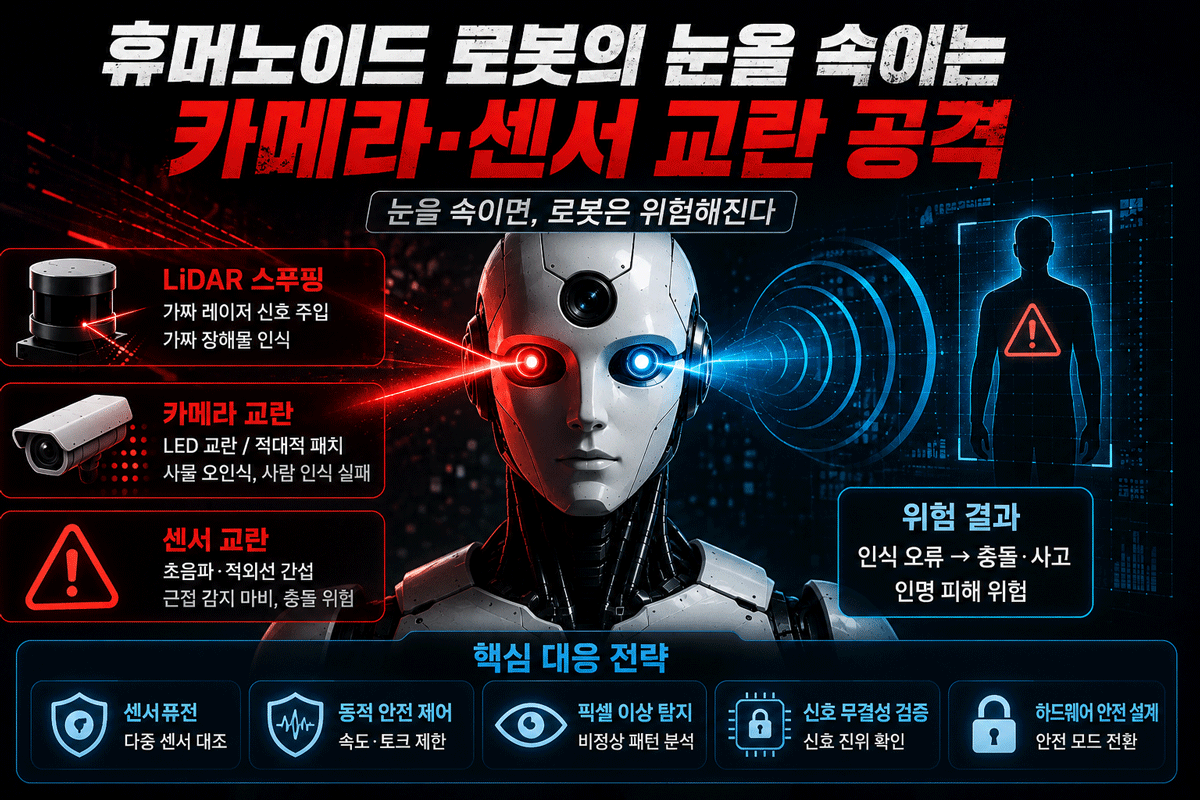
[휴머노이드 로봇 보안·안전 #3]피지컬 AI를 오염시키는 AI 모델 포이즈닝 공격
디지털 세계에 머물던 인공지능이 로봇의 몸을 입고 현실로 나오면서, 보안의 패러다임은 완전히 바뀌었다. 과거의 해킹이 데이터 유출에 그쳤다면, 이제는 AI의 두뇌 자체를 오염시켜 물리적 파괴를 유도하는 ‘AI 모델 포이즈닝(Model Poisoning)’ 공격이 피지컬 AI 안전의 최대 위협으로 부상하고 있다. 피지컬 AI는 스스로 판단하고 움직인다. 하지만 그 판단의 근거가 되는 모델이 학습 단계에서부터 오염되었다면 이야기는 달라진다. 공격자는 … 더 읽기