

산업용 로봇의 안전 펜스, 피지컬 AI 시대에도 유효한가?
현행 산업안전보건법에 따르면, 3축 이상의 관절을 가진 산업용 로봇이 작동하는 반경 내에는 반드시 사람의 접근을 차단하는 안전 펜스를 설치해야 한다. 이는 로봇의 강력한 힘과 예측 불가능한 궤적으로부터 작업자를 보호하기 위한 물리적 방어선이다. 하지만 우리 곁으로 다가온 ‘피지컬 AI(Physical AI)’, 즉 휴머노이드 로봇에게도 이 철창을 씌워야 할까? 인간과 같은 공간에서 협업하고 서빙하며 돌봄 서비스를 제공해야 할 휴머노이드가 펜스 안에 갇히는 순간, 그 효용성은 사라진다. 그러나 그들의 ‘물리적 스펙’을 들여다보면 상황은 달라진다.
산업용 로봇의 안전 펜스 9가지, 이걸 다 지켜야 한다고?
- 첫번째, 로봇의 위험점에 작업자의 신체 일부가 접근 불가능하도록 높이 1.8m이상의 안전펜스를 설치하였는가?
- 두번째, 작업자의 접근시 로봇의 운전을 정지시키기 위한 방호장치, 안전매트 등이 설치돼 있는지와 정상적으로 작동하는지?
- 세번째, 출입문 개방시 로봇이 정지하도록 연동장치가 설치돼 있으며 정상적으로 작동하는지?
- 네번째, 로봇의 수리, 검사, 조정 작업 시 기동 스위치를 열쇠로 잠근 후, 열쇠를 별도로 관리하고 조작 금지 표지판을 설치해 뒀는지?
- 다섯번째, 케이블이나 전선의 피복에 손상된 부분이 있는지?
- 여섯번째, 전기 장치에는 접지가 돼 있는지?
- 일곱번째, 비상정지 장치는 작업자가 조작하기 쉬운 위치에 있고 정상적으로 작동하는지?
- 여덟번째, 로봇 작업장 바닥에 넘어짐 사고의 위험은 없는지?
- 아홉번째, 작업장 주변 정리 정돈은 돼 있는지?
휴머노이드의 파괴력: 제조사별 토크 수치로 본 현실
휴머노이드 로봇이 인간과 닮았다고 해서 그 힘까지 인간 수준일 것이라 착각해서는 안 된다. 현재 주요 제조사들이 공개한 휴머노이드의 주요 관절(고관절, 무릎 등) 토크(Torque) 수치는 인간의 근력을 압도한다.
- 테슬라 옵티머스(Tesla Optimus Gen 2): 고관절과 무릎 부위에 탑재된 액추에이터는 약 200Nm(뉴턴미터) 이상의 토크를 발휘하는 것으로 알려져 있다. 이는 일반 성인 남성이 순간적으로 낼 수 있는 힘의 수배에 달한다.
- 보스턴 다이내믹스 아틀라스(All-Electric Atlas): 구체적인 수치는 기밀이나, 전기식 액추에이터로 전환하며 기존 유압식에 준하는 파괴력을 갖췄다. 관절당 150~250Nm 수준의 출력을 내며, 이는 인간을 가볍게 집어 던질 수 있는 수준이다.
- 피규어 AI(Figure 01): 약 100~150Nm 수준의 토크를 유지하며 정밀 제어를 수행한다.
오작동의 물리학: AI의 실수가 살인 무기가 될 때
이 수치가 실제 사고로 이어지면 어떤 일이 벌어질까? 단순 계산을 통해 그 파괴력을 가늠해 보자.
만약 100kg 무게의 휴머노이드가 소프트웨어 오류(Hallucination in Motion)로 인해 팔을 휘두른다고 가정하자. 팔의 길이가 0.7m이고 관절 토크가 150Nm일 때, 팔 끝에 가해지는 힘(F)은 약 214N 수준이다.
그러나 이 값은 정지 상태에서의 단순 힘(정적 계산)일 뿐이며, 실제 위험은 ‘속도와 질량’이 결합된 동적 상황에서 발생한다.
E = ½mv²
예를 들어, 휴머노이드의 팔과 상체 일부가 약 10kg의 유효 질량을 가지고, 팔 끝 속도가 약 6m/s로 휘둘러진다고 가정하면 충격 에너지는 다음과 같다.
- E = 1/2 × 10 × (6²)
- E = 180J (줄)
이는 프로 권투 선수의 강한 펀치나 야구 투수의 직구와 유사한 수준의 에너지다.
p = mv
여기에 운동량까지 고려하면,
- p = 10 × 6 = 60 kg·m/s
이 값은 단순한 타격을 넘어, 인체를 밀어내거나 균형을 붕괴시키는 ‘관성 충격’으로 작용하며, 이는 인간이 즉각적으로 대응하기 어려운 물리적 상황을 만든다.
인간의 두개골이 골절되는 데 필요한 힘은 부위에 따라 약 2,300N~4,000N 수준으로 알려져 있다. 정적 힘만으로 보면 214N은 이에 미치지 못하지만, 실제 사고에서는 고속 회전에 따른 충격 에너지와 운동량이 결합되며 전혀 다른 결과를 만들어낸다.
결국 로봇의 관절이 고속으로 회전하며 인간의 머리를 타격할 경우, 단순 타박상을 넘어 심각한 외상이나 생명에 위협이 되는 수준의 충격으로 이어질 가능성을 배제할 수 없다.
협동 로봇(Cobot)처럼 충돌 감지 센서가 존재하더라도, 고중량 휴머노이드의 경우 관성으로 인해 물리적인 정지 거리가 확보되지 않으면 사고 회피 자체가 어려워질 수 있다.
더 큰 문제는 이러한 동작이 일회성에 그치지 않는다는 점이다. 제어 오류가 발생할 경우, 로봇은 외부 개입이나 시스템 차단이 이뤄지기 전까지 동일한 동작을 반복할 수 있으며, 이는 사실상 배터리가 방전되거나 전원이 차단될 때까지 지속될 수 있는 위험 상태를 의미한다.
물리적 펜스를 넘어선 ‘디지털 및 제도적 펜스’의 구축
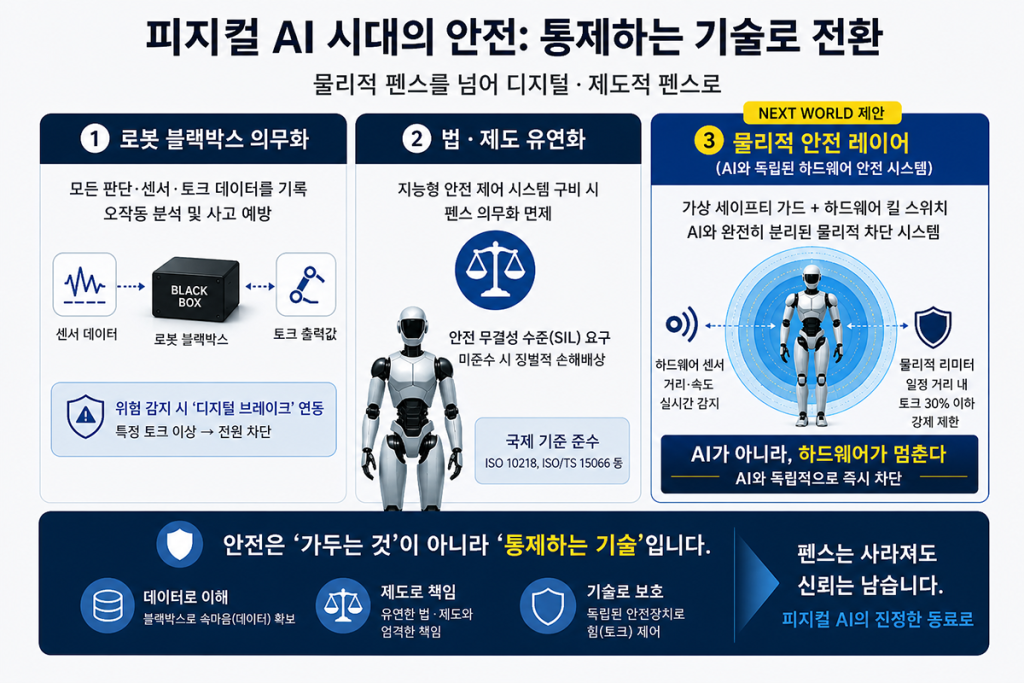
피지컬 AI를 현행법상의 ‘로봇팔’로 규정한다면 모든 휴머노이드는 펜스 안에 갇혀야 한다. 하지만 이는 기술의 퇴보를 의미한다. 우리는 물리적 펜스를 허무는 대신, 더 정교한 안전장치를 도입해야 한다.
첫째, NEXT WORLD가 앞서 주장했던 ‘로봇 블랙박스’의 의무화가 시급하다.
로봇의 모든 판단 과정, 센서 데이터, 토크 출력값을 기록하는 블랙박스는 사고 시 책임 소재를 가리는 것을 넘어, AI의 오작동 패턴을 분석해 선제적으로 차단하는 ‘학습 도구’가 될 것이다. 사고 직전의 로그를 분석해 특정 토크 이상이 감지되면 하드웨어적으로 전원을 차단하는 ‘디지털 브레이크’ 시스템이 블랙박스와 연동되어야 한다.
둘째, 법적 제도의 유연한 뒷받침이 필요하다.
현행 산업안전보건법의 ‘펜스 의무화’ 조항을 ‘지능형 안전 제어 시스템 구비 시 면제’와 같은 방식으로 개정해야 한다. 대신 로봇 제조사에 엄격한 ‘안전 무결성 수준(SIL)’을 요구하고, 이를 어길 시 징벌적 손해배상을 청구할 수 있는 법적 근거가 마련되어야 한다.
“국제 기준 (ISO 10218, ISO/TS 15066 등)”
셋째, 여기서 나아가 NEXT WORLD가 제안하는 해법은 ‘가상 세이프티 가드(Virtual Safety Guard)’와 ‘하드웨어 킬 스위치’의 분리다.
1) 소프트웨어 AI가 모든 것을 통제하게 두어서는 안 된다.
AI의 논리 회로와는 완전히 별개로 작동하는‘물리적 비상 차단 레이어’를 하드웨어 수준에서 독립시켜야 한다. 마치 원자력 발전소의 제어봉처럼,
2) 물리적 리미터 내장
AI가 판단을 내리기 전에 하드웨어 센서가 인간과의 거리를 물리적으로 측정하여 일정 거리 안에서는 토크 출력을 강제로 30% 이하로 제한하는 ‘물리적 리미터’가 내장되어야 한다. 이는 단순한 제어가 아니라, AI의 오류를 물리적으로 무력화하는 마지막 안전장치다.
결국 피지컬 AI 시대의 안전은 ‘가두는 것’이 아니라 ‘통제하는 기술’에 있다.
로봇이 인간과 닮아갈수록 우리는 그들의 속마음(데이터)을 들여다볼 블랙박스를 준비해야 하며, 그들의 힘(토크)을 억제할 법적, 기술적 안전장치를 동시에 구축해야 한다.
펜스는 사라질 수 있다.
그러나 통제 시스템은 반드시 남아야 한다.그래야만 피지컬 AI는 비로소 우리의 ‘동료’가 될 수 있다.
[글에서 사용한 머리 아픈 용어]
- 토크(Torque): 물체를 회전시키는 힘의 크기를 말하며, 로봇의 관절이 얼마나 강력하게 움직이고 사람을 밀어낼 수 있는지를 결정하는 물리적 지표이다.
- 액추에이터(Actuator): 전기 에너지를 물리적인 움직임으로 바꿔주는 로봇의 ‘근육’ 같은 장치로, 로봇의 팔다리가 실제로 힘을 내어 움직이게 만드는 핵심 부품이다.
- 하드웨어 킬 스위치(Hardware Kill Switch): AI 소프트웨어가 고장 나더라도 기계적으로 즉시 전원을 끊어버리는 비상 버튼으로, 로봇의 폭주를 막는 최후의 물리적 안전장치이다.
- 안전 무결성 수준(SIL, Safety Integrity Level): 시스템이 얼마나 안전하게 설계되었는지 등급을 매기는 기준으로, 숫자가 높을수록 위험한 상황에서 오작동 없이 안전을 지킬 확률이 높음을 의미한다.
- 동적 에너지(Dynamic Energy): 멈춰 있는 힘이 아니라 움직이는 속도와 무게가 합쳐진 파괴력으로, 로봇이 팔을 휘두를 때 사람에게 가해지는 실제 충격의 강도를 나타낸다.
※ 특정 산업이나 자산에 대한 투자 판단은 본인의 책임 하에 신중히 결정하시기 바랍니다.